
 Submit
Submit






DOI: https://doi.org/10.61189/314845qnicsc
Received January 19, 2025; Accepted February 19, 2025; Published March 31, 2025
Highlights
● Continuous suturing in traditional manual suturing shortens operation time and reduces infection risk. Absorbable sutures are preferred for intestinal suturing and anastomosis to minimize foreign body reactions.
● Mechanical anastomosis with linear and circular metal staples offers distinct advantages, while new biodegradable staples demonstrate good performance.
● Magnetopressure anastomosis, leveraging magnetic attraction, has shown success in specific scenarios, providing innovative approaches to intestinal anastomosis.
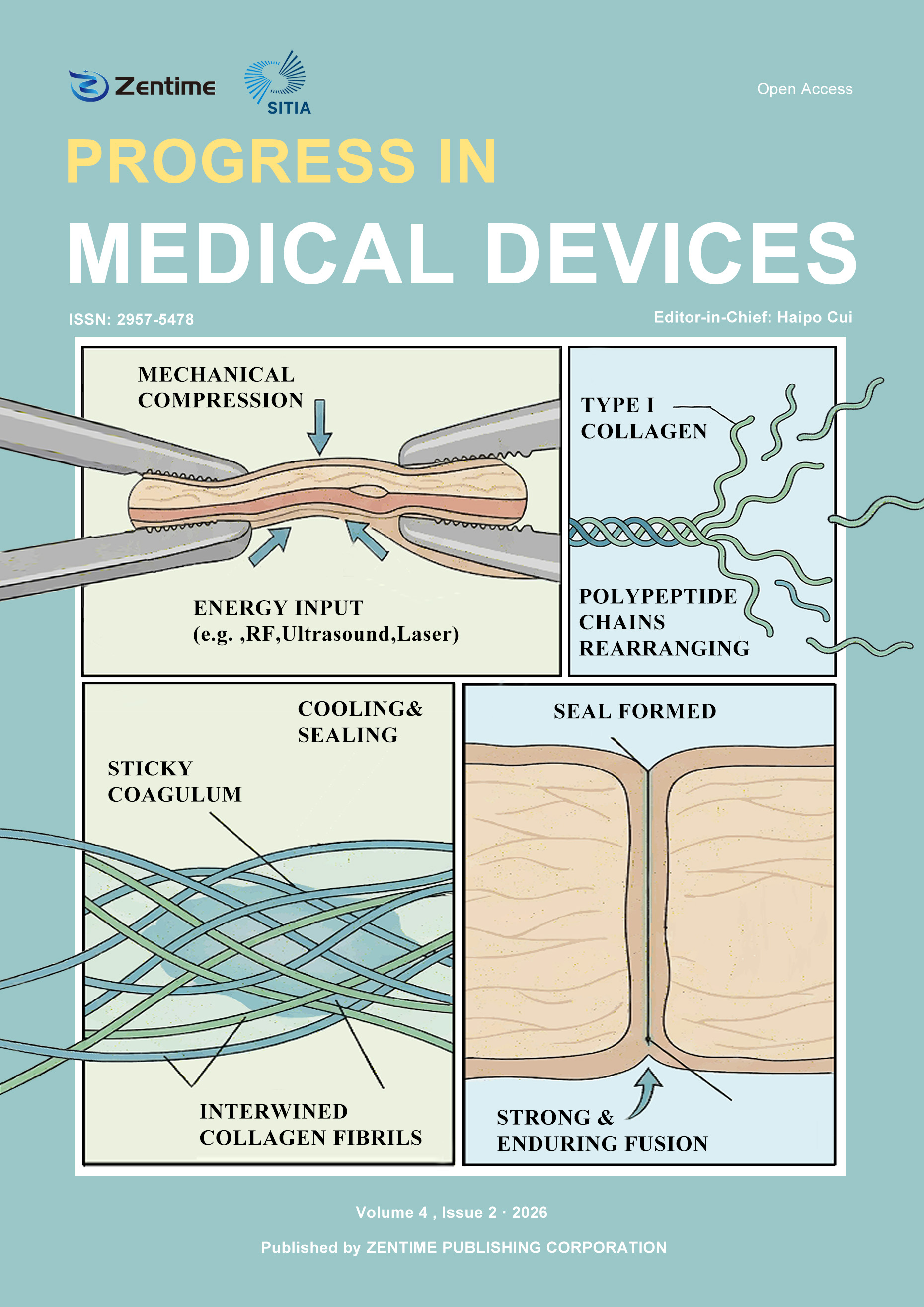
● Radio frequency energy tissue welding technology enables rapid, seamless intestinal anastomosis, with fewer complications and holds strong potential for future applications.
● The support method for intestinal anastomosis, particularly the "degradable internal stent anastomosis" using a simple support method, shows significant promise in animal studies.